Nell’ambito del miglioramento sismico è importante validare l’efficacia di un intervento attraverso l’utilizzo di un software strutturale FEM che permetta di verificare la bontà dell’intervento progettato. In che cosa consiste l’identificazione dinamica e qual è il suo scopo?
L’identificazione dinamica delle strutture
Validare l’efficacia di un intervento di miglioramento sismico permette di verificare la qualità dell’intervento progettato.
Il modello dell’edificio oggetto di indagine viene creato partendo dai disegni costruttivi e dalle campagne di indagine condotti sui materiali che compongono gli elementi strutturali (pilastri e travi) e non strutturali (tamponature).
A causa delle informazioni limitate sulla struttura, non sempre il modello così creato costituisce una rappresentazione sufficientemente fedele del reale comportamento dinamico della struttura. Al fine di migliorare il comportamento dinamico del modello strutturale, si utilizza una metodologia chiamata “identificazione dinamica”.
Lo scopo dell’identificazione dinamica è quello di trovare i parametri modali dell’edificio, ovvero frequenze proprie, masse modali, smorzamenti e forme modali. La conoscenza di questi parametri permette di descrivere la risposta dinamica dell’edificio, considerando il comportamento lineare e tempo-invariante. Sulla base dei parametri modali identificati in campo, è possibile raffinare il modello ad elementi finiti in modo da ottenere una corrispondenza tra i parametri modali del modello FEM e quelli sperimentali. Il modello FEM così opportunamente modificato si dice “calibrato” e permette di effettuare una simulazione dinamica estremamente più accurata e attinente al reale comportamento della struttura.
L’identificazione dinamica consiste nel misurare il movimento di una struttura sottoposta a forzanti esterne (note o meno) e, grazie ad algoritmi di analisi dati, estrapolare i parametri di interesse. Per poter eseguire una corretta identificazione, la struttura deve dunque essere opportunamente sensorizzata. I sensori accelerometrici vengono posti in punti significativi che permettono di estrarre le forme modali di interesse. I sensori devono essere in grado di percepire vibrazioni anche minime della struttura. Per questo motivo vengono generalmente utilizzati accelerometri con sensibilità molto elevata.
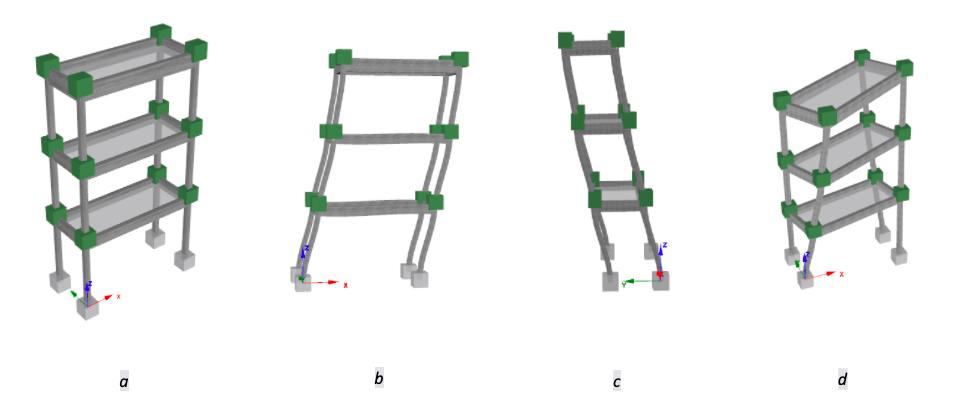
Figura 1: a) modello FEM dell’edificio; b) primo modo; c) secondo modo; d) terzo modo. Posizioni strategiche dei sensori per l’identificazione dei tre primi modi possono essere i vertici dell’ultimo piano
Attualmente vengono utilizzate due metodologie differenti per effettuare l’identificazione dinamica: experimental modal analysis (EMA) e operational modal analysis (OMA). La differenza tra le due metodologie consiste nella diversa eccitazione della struttura.
Nell’EMA la forzante in input alla struttura è nota e controllata. Essa può essere fornita tramite vibrodina o tramite martello dinamometrico. Con la vibrodina possono essere effettuate eccitazioni stazionarie (stepped-sine) o quasi-stazionarie (sine-sweep) nel range di frequenze di interesse (generalmente il range 0.5-15 Hz è sufficiente per identificare i modi che dominano la risposta dell’edificio). Con il martello invece la forzante è impulsiva, e vengono eccitate frequenze anche molto alte (anche oltre i 1000 Hz, in funzione della durezza della punta utilizzata). L’input, per mezzo di misure dirette sulla vibrodina o con martello dinamometrico, e l’output, per mezzo degli accelerometri, vengono campionati e analizzati in frequenza, ottenendo la Frequency Response Function (FRF) della struttura. I modelli modali vengono estratti modificando i parametri modali fino a ottenere il best-fit tra la FRF numerica e quella sperimentale, per mezzo di un’ottimizzazione ai minimi quadrati.
Nell’OMA invece la forzante in input alla struttura è ignota e non misurata. Essa generalmente consiste nell’eccitazione ambientale (ad esempio vento, traffico, passi delle persone, ecc..). Nel caso di Operational Modal Analysis si assume che l’input sia un rumore bianco, ovvero un segnale random con spettro costante su un ampio range di frequenze. Quest’ipotesi pur non essendo esatta è necessaria per poter utilizzare gli strumenti matematici che stanno alla base di questo metodo. Anche nel caso dell’OMA i parametri modali possono essere stimati applicando metodi di best fitting.
Le due metodologie hanno in comune:
- Necessità di installare sensori in punti strategici
- Necessità di evitare fenomeni di vibrazioni locali (ad esempio lavori localizzati vicino ad un unico sensore possono rovinare un intero set di dati)
La tabella sottostante raccoglie il confronto tra le due metodologie.
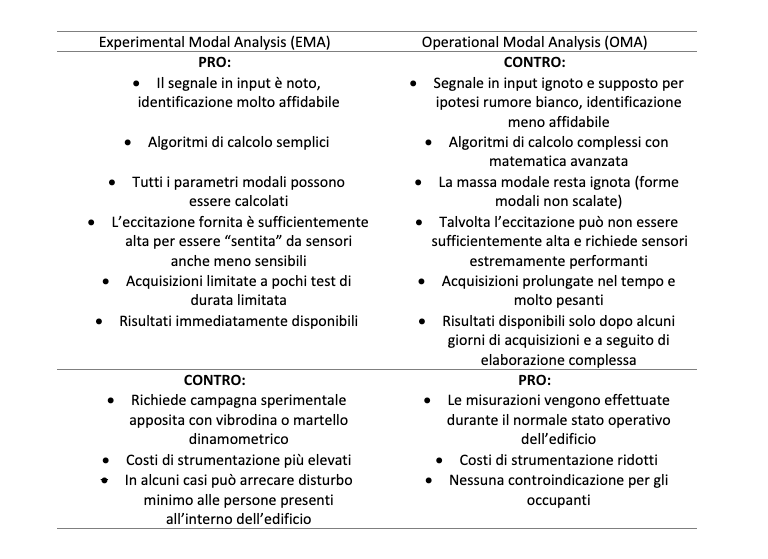
In definitiva, in tutti i casi in cui l’EMA sia attuabile (possibilità di installare vibrodine, numero di persone dentro l’edificio ridotto o nullo) essa è preferibile all’OMA perchè fornisce risultati più precisi e più immediati. In tutti gli altri casi può essere applicata l’OMA.
Ad ogni modo, il processo di identificazione dinamica consente di ottenere una sorta di “carta d’identità” dinamica della struttura sulla quale si esegue. Questo permette, quindi, di valutare lo stato di salute della struttura e consente il processo di calibrazione dei modelli numerici che sono essenziali per lo studio del comportamento dell’edificio sottoposto a forzanti sismiche.
Autore: Fabio Bolognesi